One day we will be able to 3D print functioning combustion engines in 1:10 scale, but for now the car will have to be driven by regular old electric motor, it’s sad but true, I know!
Why Reduction Is Needed
Small electric motors spin incredibly fast, but don’t generate much torque. In order to make them useful we need to gear them down appropriately.
Most RC cars get the majority of the reduction done in the first step, using a very small pinion on the motor, and a very large spur gear, but this is not really suitable for a realistically shaped gearbox, so I will use multiple stages of gears to achieve the desired reduction.
Design Goals
I have the following design goals for this reduction box.
- Motor must be low (for centre of gravity)
- Fully printable (without support wherever possible)
- Strong gears, big teeth, easy to print
- All gears to be hidden in a (semi) realistic enclosure
- Minimize unique parts
Selecting a Ratio
Although you can get a lot of power out of the “540” sized motors commonly used in RC cars, they still need a lot of gearing down, so it’s time to design a reduction gearbox.
I have done some rough “back of the napkin” calculations which show that a final drive ratio of about 8.5 will be decent starting point. The glory of printing is that we can experiment and revise once the car is working
| Theoretical Max Speed Calculation |
|
|
|
|
Example 1 |
Example 2 |
Example 3 |
| Motor RPM |
17000.00 |
22000.00 |
22000.00 |
| Brushless Motor kV equivalent (2S) |
2297 |
2973 |
2973 |
| Brushless Motor kV equivalent (3S) |
1532 |
1982 |
1982 |
| Final Drive Ratio |
8.50 |
11.00 |
8.50 |
| Rear Wheel Diameter (mm) |
95.00 |
95.00 |
105.00 |
| Distance in One Wheel Revolution (mm) |
298.45 |
298.45 |
329.87 |
| Distance in One Motor Revolution (mm) |
35.11 |
27.13 |
38.81 |
| Speed (km/hr) |
35.81 |
35.81 |
51.23 |
Gear Design
Although I did not use this tool to generate the gear profiles, I find it very useful for visualising a complete setup, you can follow this link to mess around with it yourself (link).

Gear Generator Screenshot
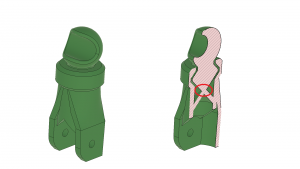
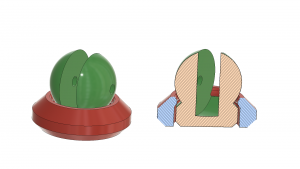
I decided on a stackable gearbox design, which consists of repeats of the same section, each one accounting for a 11/17 reduction in final drive ratio, resulting in a 5.7:1 ratio at the output.
This leaves room for a further reduction at rear axle (13/21, for example, would result in a final drive of 9.2:1)
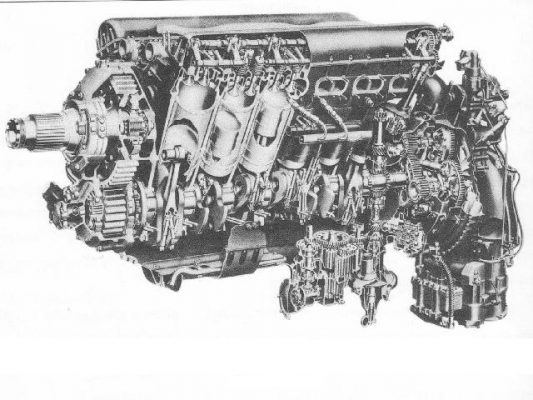
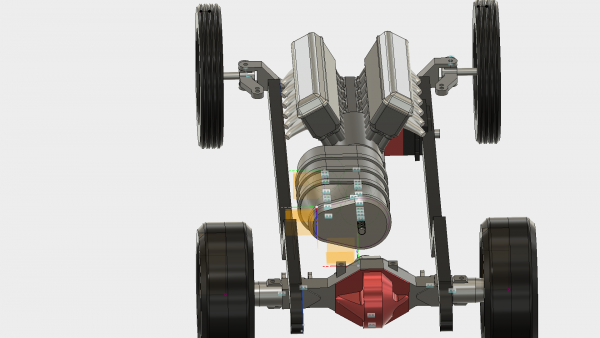
Engine Model
Just because we are forced to use an electric motor doesn’t mean we have to look at one, so I began the design of a Merlin V12, scaled to 1:10. This engine will go over the electric motor, and given it’s size, probably also hide some electronics or the steering servo.
There are of course many details to go, but having the rough shape helps me work out the car’s final dimensions.
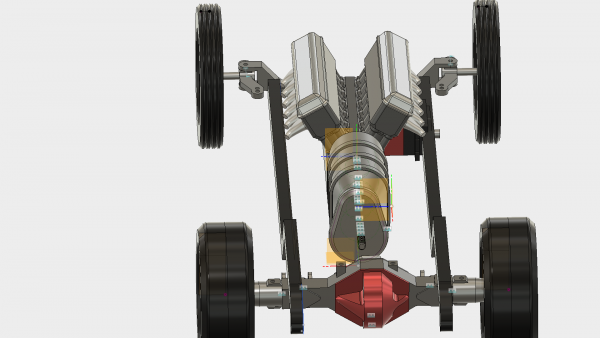
Gearbox Location
The gearbox can be orientated horizontally or vertically, which I am not yet decided on. I prefer the vertical orientation for aesthetic reasons, but horizontal may be more practical.
Either way, the motor stays at the lowest point, and the output is roughly in line with the rear axle input shaft.
Up Next
The next most pressing issue is probably to design the rear axle, and the telescoping driveshaft that will connect it to the gearbox, so stay tuned. In the meantime, I am curious to hear your thoughts!
 “Big Dave and his little brother make parts in days that would otherwise take weeks or even months to prototype or manufacture conventionally. With cost savings of over £40k achieved in the last year alone, our Robox 3D printers have become an integral part of our business and we’re pleased to call CEL our partners.”
“Big Dave and his little brother make parts in days that would otherwise take weeks or even months to prototype or manufacture conventionally. With cost savings of over £40k achieved in the last year alone, our Robox 3D printers have become an integral part of our business and we’re pleased to call CEL our partners.”